 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Viewpoint and Multi-Evaluation with Felicitous Inductive Bias Boost Machine Abstract Reasoning Ability
Oct 26, 2022Great endeavors have been made to study AI's ability in abstract reasoning, along with which different versions of RAVEN's progressive matrices (RPM) are proposed as benchmarks. Previous works give inkling that without sophisticated design or extra meta-data containing semantic information, neural networks may still be indecisive in making decisions regarding RPM problems, after relentless training. Evidenced by thorough experiments and ablation studies, we showcase that end-to-end neural networks embodied with felicitous inductive bias, intentionally design or serendipitously match, can solve RPM problems elegantly, without the augment of any extra meta-data or preferences of any specific backbone. Our work also reveals that multi-viewpoint with multi-evaluation is a key learning strategy for successful reasoning. Finally, potential explanations for the failure of connectionist models in generalization are provided. We hope that these results will serve as inspections of AI's ability beyond perception and toward abstract reasoning. Source code can be found in https://github.com/QinglaiWeiCASIA/RavenSolver.
EiHi Net: Out-of-Distribution Generalization Paradigm
Sep 29, 2022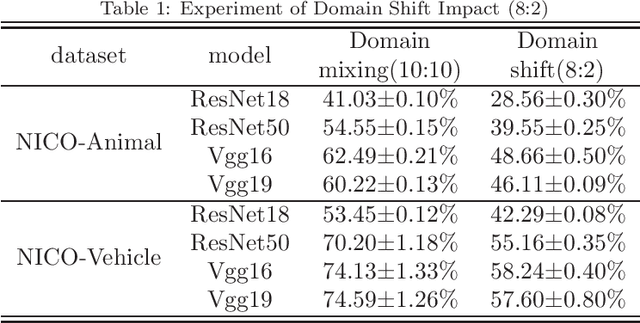
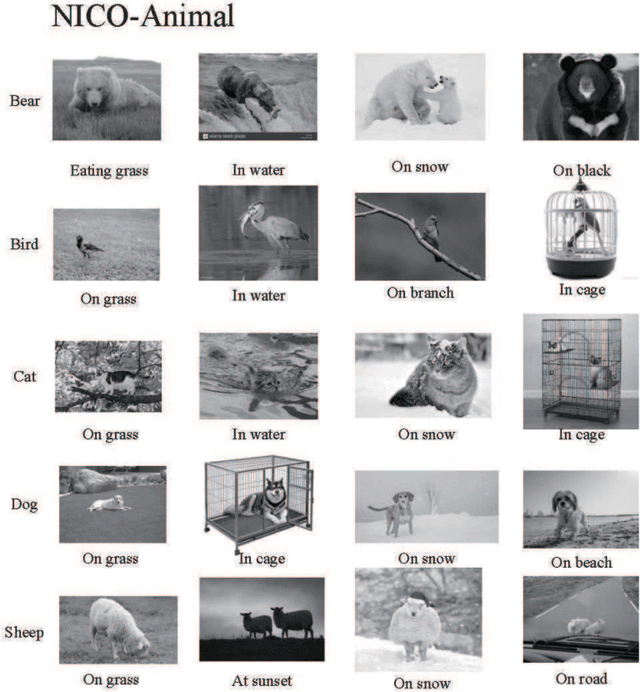
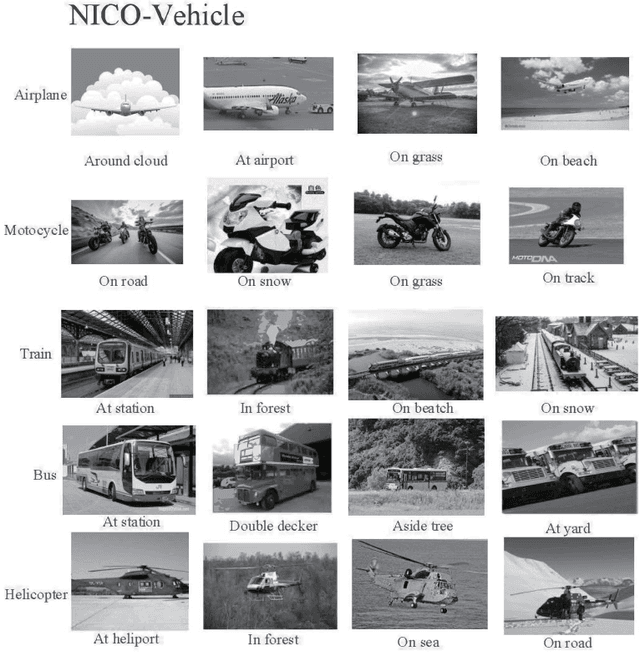
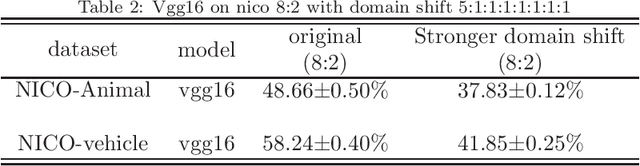
This paper develops a new EiHi net to solve the out-of-distribution (OoD) generalization problem in deep learning. EiHi net is a model learning paradigm that can be blessed on any visual backbone. This paradigm can change the previous learning method of the deep model, namely find out correlations between inductive sample features and corresponding categories, which suffers from pseudo correlations between indecisive features and labels. We fuse SimCLR and VIC-Reg via explicitly and dynamically establishing the original - positive - negative sample pair as a minimal learning element, the deep model iteratively establishes a relationship close to the causal one between features and labels, while suppressing pseudo correlations. To further validate the proposed model, and strengthen the established causal relationships, we develop a human-in-the-loop strategy, with few guidance samples, to prune the representation space directly. Finally, it is shown that the developed EiHi net makes significant improvements in the most difficult and typical OoD dataset Nico, compared with the current SOTA results, without any domain ($e.g.$ background, irrelevant features) information.
Development of an Autonomous Sanding Robot with Structured-Light Technology
Mar 08, 2019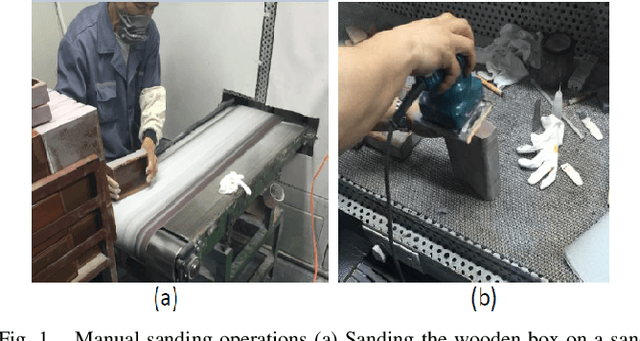
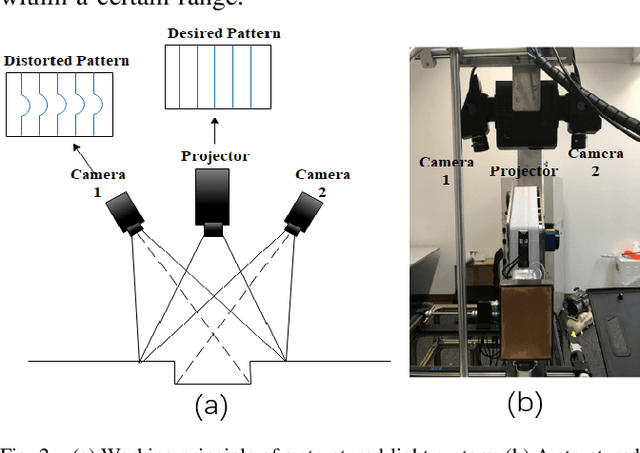
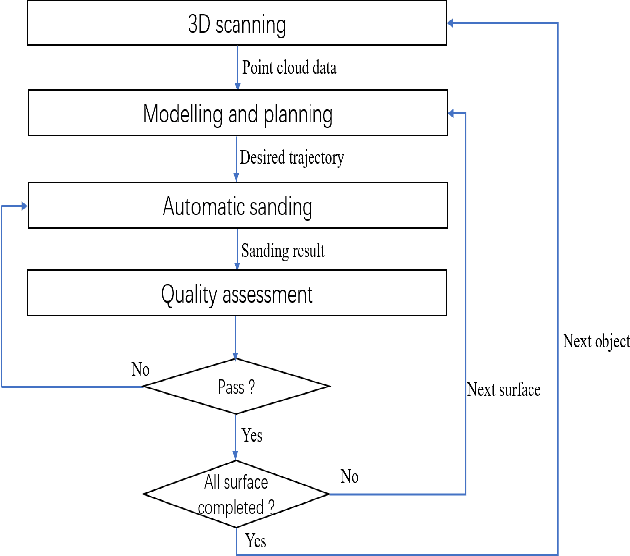
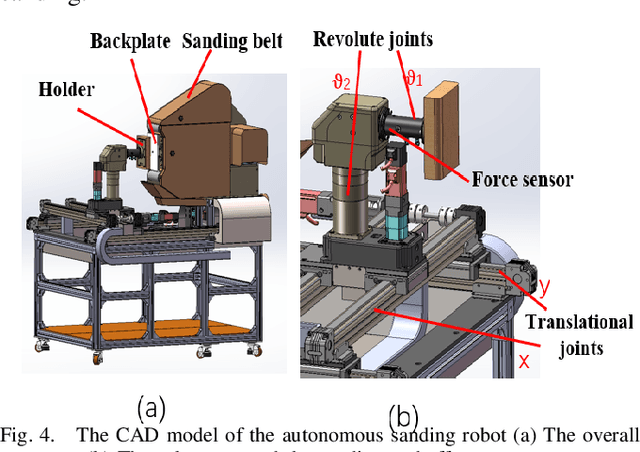
Large demand for robotics and automation has been reflected in the sanding works, as current manual operations are labor-intensive, without consistent quality, and also subject to safety and health issues. While several machines have been developed to automate one or two steps in the sanding works, the autonomous capability of existing solutions is relatively low, and the human assistance or supervision is still heavily required in the calibration of target objects or the planning of robot motion and tasks. This paper presents the development of an autonomous sanding robot, which is able to perform the sanding works on an unknown object automatically, without any prior calibration or human intervention. The developed robot works as follows. First, the target object is scanned then modeled with the structured-light camera. Second, the robot motion is planned to cover all the surfaces of the object with an optimized transition sequence. Third, the robot is controlled to perform the sanding on the object under the desired impedance model. A prototype of the sanding robot is fabricated and its performance is validated in the task of sanding a batch of wooden boxes. With sufficient degrees of freedom (DOFs) and the module design for the end effector, the developed robot is able to provide a general solution to the autonomous sanding on many other different objects.